自工会、「自動運転ビジョン」を発表
2015年11月6日 (金曜) 0:00
2015年11月6日、一般社団法人日本自動車工業会(以下:自工会、東京都港区、会長:池 史彦)は、第44回東京モーターショー2015の会期中に東京ビッグサイトにて、「自動運転は、クルマを、くらしを、社会をどう変えていくのか」と題し、「SMART MOBILITY CITY 2015 国際シンポジウム」開催し、同会がとりまとめた「自動運転ビジョン」を発表した。
自工会では、「自動運転検討会」を立ち上げ、「環境」「安全」「強調・標準化」の3つの観点から、ハード対策と併せて、交通安全啓発活動や道路交通環境改善などソフト対策にも注力しており、自動運転の実用化に向けたビジョンの取りまとめを行った。
自動運転の実用化と普及には、以下3つの要素が不可欠となる。
- 自動運転技術の枠組みの整理
- 共通基盤技術
- 制度・インフラ
同会では、それぞれの展開には、自動車産業界だけでなく、自動車産業の枠組みを超えた技術的協力関係および、行政との連携が必要不可欠であるとしている。各要素の概要は次の通り。
◆要素の概要
- 自動運転技術の枠組み(図1参照)
図1 始動運転技術の枠組み
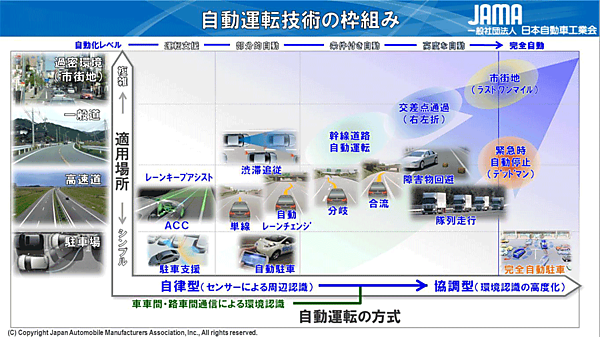
・自動運転の方式:
自律型といわれる車載センサーで周囲の認識行い、通信を使用して周辺や広域いたる情報と連携させ、環境認識を高度化させた協調型とする。
・適用場所:
走行環境が「シンプル」であるか、「複雑」であるかのレベルの違いを分類する。
図1では技術的な難易度も示しており、右上の表示される機能は、技術開発の時間も必要とされる。
- 共通基盤技術(図2参照)
図2 共通基盤技術(連携領域)
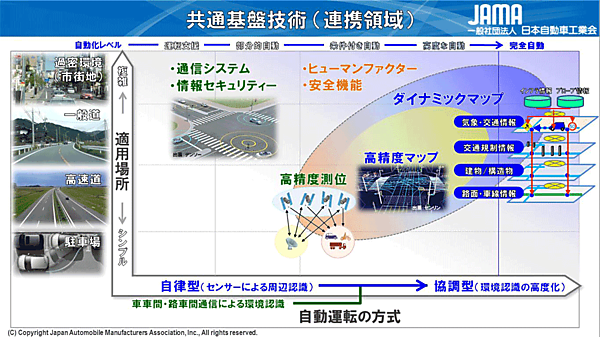
共通基盤技術については、自動車メーカーなどで独自に開発するものではなく、共通で利用できる技術を定義する。また、自動車産業の枠組みを超えた技術開発や運用の仕組みを必要とする領域となる。
・通信システム、情報セキュリティー:
社会インフラとして、共通利用すべき技術やサービスとし、ハッキングやサイバー攻撃による個人情報や車両の安全性を防護する仕組み作りが必要となる。
・ヒューマンファクター、安全機能の研究:
故障時のシステム動作や、「自動運転」から「手動運転」への移行に関するガイドラインの設定や、安全性に関わる設計要件・ガイドラインの設定が必要となる。
・高精度測位、高精度マップ、ダイナミックマップの開発や運用のしく仕組み作り:
自律的な自動運転を支える基盤技術であり、インフラとなる高精度マップやその上に、建物、地物、交通情報、気象情報といった常に最新情報に更新されるデータと連携したダイナミックマップの開発・運用が必要となる。
- 制度やインフラ(図3参照)
図3 制度・インフラ領域
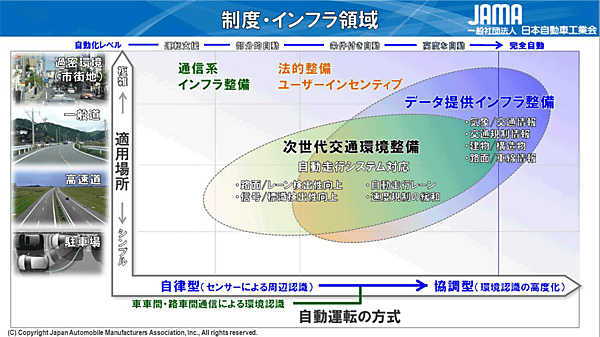
・通信系のインフラ整備:
ダイナミックマップの更新データ配信に必要な通信システムや、協調型自動運転に必要な路車間通信システム、車両間通信の電波利用の枠組みとなる。
・法的整備、ユーザーインセンティブ:
自動運転レベルに応じた、ドライバー/システムの責任区分や道路交通法および、車両構造法などの車両の運行に関わる法規の整備などの範囲。
保険制度(割引)や自動車税など、自動運転技術の普及促進につながるユーザーに向けた施策。
・データ提供インフラ整備:
高精度地図に上書き更新される建物や構造物のデータ、リアルタイム交通情報や気象情報など、高い信頼性を確保した上でのデータ配信サービスの仕組み作り。
上記これらの要件を展開するにあたり、ロードマップは次の通り大別され、段階的に推進される(図4参照)
- ~2020年:自動運転の実用化、導入期
- ~2030年:普及拡大、展開期
- ~2050年:定着、成熟期
図4 自動運転の展開シナリオ

また、2020年は東京オリンピック・パラリンピックの開催の年ということもあり、同年をマイルストーンとして「戦略的イノベーション創造プログラム(SIP)」の研究・開発テーマでもある「次世代交通システム」および、「自動走行システム」の実用化に向けた動きが加速していく。(図5参照)
図5
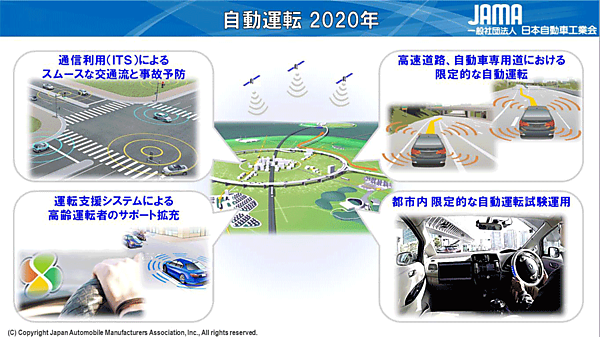
図5
自工会としても、同年を自動運転の展開シナリオのマイルストーンとして、精力的に取り組む。
■リンク
自工会
筆者の人気記事
新着記事
新刊情報