卓上を「自動運転」しながらスマホを発見し充電するロボット、KDDI総合研究所が開発
2017年3月17日 (金曜) 0:00
KDDI総合研究所は、卓上にあるスマホを見付け出し、自動的に充電するロボットを開発したと発表した。
KDDI総合研究所は2017年3月16日、卓上にあるスマートフォン(スマホ)を見付け出し、自動的に充電するロボット「充電ロボ」の試作品(プロトタイプ)を開発したと発表した。卓上の自身の位置を把握しながら、障害物を避け、卓上から落ちないように動き回る「自動運転」機能を備えるロボットだ。高い精度でスマートフォンのUSB端子を認識する能力を持たせながら、Raspberry Pi Zeroなどの既製品のマイコンボードを活用し、画像処理やシステム制御のソフトウェアを工夫することで安価な部品のみで実現したという。
図 「充電ロボ」とスマートフォン

出所 KDDI総合研究所
充電ロボは搭載しているカメラと距離検知センサーで卓上の状況と、卓上にある物体を認識する。スマートフォンではないものは障害物とみなし、避けて移動する。スマートフォンを見つけると、そのUSB端子を探し出し、充電ロボが本体前面に備えているUSB端子と接続する。接続したら、充電ロボが内蔵している蓄電池の電力をスマートフォンに流して充電する。充電が完了するとスマートフォンと本体を切り離し、充電ロボ自身の充電ステーションに戻る。移動時は、タイヤの回転量から現在位置を推定する。
図 「充電ロボ」の主な構成部品
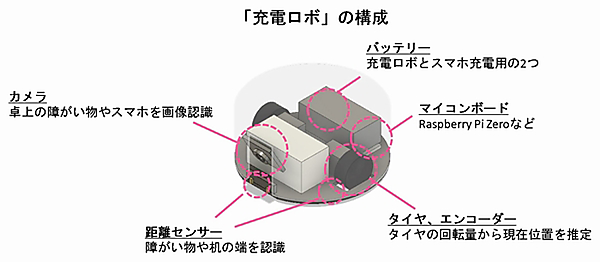
出所 KDDI総合研究所
充電ロボは、Googleが主催するアイデアコンテスト「Android Experiments OBJECT」で特別賞を受賞したという。Android Experiments OBJECTは、「Androidとつながることで、世界がもっと便利に、もっと楽しくなるようなデバイスを、みんなのアイデアでつくる」というコンセプトを掲げて、アイデアを一般公募した。
Android Experiments OBJECTの受賞作品紹介を見ると、充電ロボを開発する際の「チャレンジ」は「卓上の自動運転技術」だとしている。卓上には公道とは異なり標識も車線もガードレールもない。その卓上を障害物を避けながら、卓上から落ちないように卓上の縁を検知して、目的のスマートフォンまでたどり着かせるのは大きなチャレンジだったと想像できる。スマートフォンの充電などという他愛もない用途ではなく、社会の大きな問題を解決するときにこの技術が役立つことを願いたい。
■リンク
KDDI総合研究所
筆者の人気記事
新着記事
新刊情報