横浜市で、ローカル5Gと路側インフラを活用した「自動運転レベル4」の実証実験を開始
2026年2月13日 (金曜) 12:12
2026年1月17日から22日にかけて、横浜市において自動運転バスの走行実証実験(以下、本実証)が実施された。
NTTドコモビジネスを代表機関とするコンソーシアム8社注1、2つの協力機関注2、および横浜市が官民一体となって進める先進的な試みだ。
その狙いは、深刻化するバス運転者不足や休日の激しい交通渋滞、さらに狭い道路での対向車とのすれ違い(離合)といった課題に対し、通信制御技術と路車協調技術注3を組み合わせた新たな自動運転モデルを構築することにある。
本稿では、「公共交通の持続可能性」と「都市インフラの高度化」という2つの視点から、「自動運転レベル4」実装に向けた本実証の概要を見ていく。
混雑地域や狭あい道路でも安定運行を可能に。「自動運転レベル4」の社会実装を目指す
昨今、バス運転者の不足や路線の縮小により、横浜市内でも交通サービスの維持が大きな課題となっている。特によこはま動物園ズーラシア周辺では、休日を中心に来園者による交通渋滞や入庫待ちの車列が発生しており、安全で効率的なバス運行を支える新たな交通モデルが強く求められている。
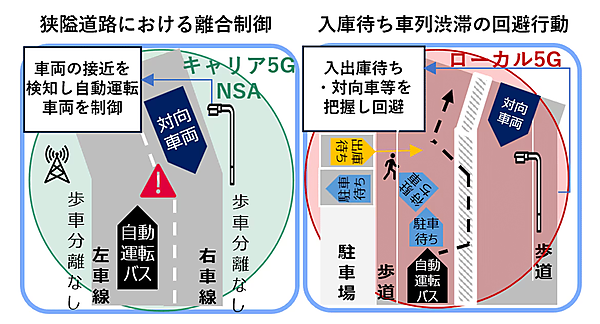
こうした背景から、NTTドコモビジネスをはじめとする関係各社は、無線リソースを最適化する「通信制御」と、ローカル5Gや路側インフラを連携させる「路車協調」を融合し、「都市部の混雑地域や見通しの悪い狭い道路でも安定して運行できる自動運転レベル4」の社会実装に向けた検証を行った。
自動運転レベル4(高度運転自動化)とは、特定の条件下においてシステムがすべての運転操作を行い、緊急時の対応も「ドライバーレス」で完結する状態を指す。日本では2023年4月の改正道路交通法により解禁され、過疎地の巡回バスやロボタクシーなどでの実用化が開始されている。国内初の先行事例には、福井県永平寺町で導入された低速電動カートがある。
総務省「地域社会DX推進パッケージ事業」の採択、2024年度の成果をさらに拡大
本実証は、総務省の令和6年度補正予算「地域社会DX推進パッケージ事業(自動運転レベル4検証タイプ)(以下、実証事業)」の採択を受けて実施されたもの。これは2024年度に行われた「よこはま動物園ズーラシア周辺での自動運転実証実験」注4の成果をさらに発展させたものだ。
2024年度は、同園周辺の往復約2km区間で小型車両による通信切り替え制御と安全性を検証したが、今回の実証では、走行車両を2台に増やし、走行区間も相鉄本線・鶴ケ峰駅からよこはま動物園北門までの往復約10.6kmへと拡大した。
検証の内容も、2024年度の実証で行われた、「通信品質の可視化」や「映像伝送の安定化」から一歩進み、路側インフラ連携や車両間通信の統合制御にまで発展させて、都市部での自動運転における路車協調制御技術の有効性を明らかにする。
実証の概要と検証内容
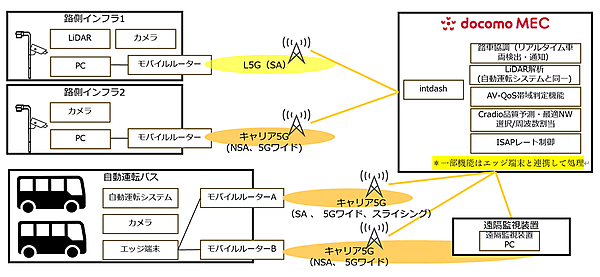
実証実験における技術要素と構成は、図1の通りである。
図1 実証実験の構成図
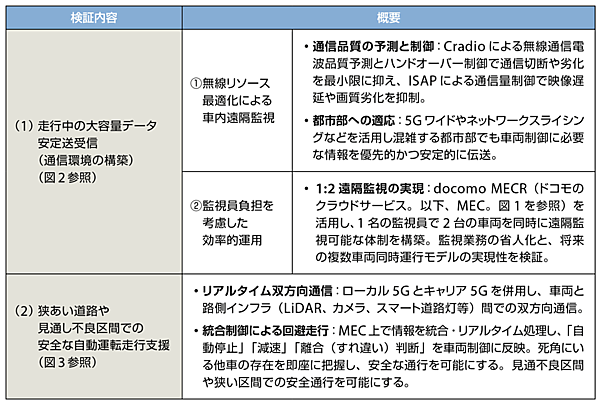
今回の主な検証内容は、表1の通りである。
「1:2遠隔監視」の実現は、深刻な運転者不足に対する直接的な解法であり、運行コストの抑制に直結する。また、実証で活用される先端基盤は、自動運転の走行支援だけでなく、リアルタイムの防災・防犯カメラ、あるいは渋滞を緩和する動的な交通制御システムへと転用可能な「都市の神経網」となり得る。
表1 通信環境、路側インフラ連携などの検証概要
LiDAR:Light Detection And Rangingの略。レーザー光を照射した反射光の情報をもとに、対象物までの距離や形などを計測する技術。
スマート道路灯:灯具機能に加え筐体組込み型AIカメラや環境センサー、路面描画装置を搭載した次世代道路照明灯。
出所 下記サイトを参考にして筆者作成、
https://www.ntt.com/about-us/press-releases/news/article/2026/0116.html
図2 通信環境のイメージ
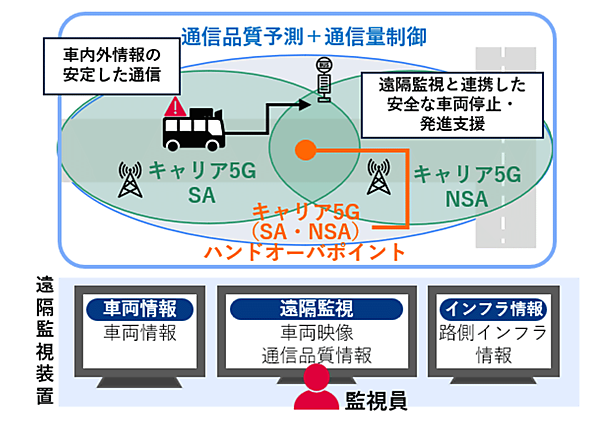
図3 路側インフラ連携のイメージ
出所 https://www.ntt.com/about-us/press-releases/news/article/2026/0116.html
注1:コンソーシアム8社:NTTドコモビジネス株式会社、NTTアドバンステクノロジ株式会社、株式会社NTTデータ経営研究所、スタンレー電気株式会社、株式会社東海理化、ドコモ・テクノロジ株式会社、相鉄バス株式会社、先進モビリティ株式会社を指す。
注2:2つの協力機関:NTTアクセスサービスシステム研究所、NTTネットワークサービスシステム研究所を指す。
注3:路車協調技術:道路側(路側)に設置されたセンサーやカメラなどのインフラと、自動車(車)のシステムが通信で連携し、安全で円滑な自動運転や交通を実現するためのシステム。
注4:総務省令和5年度補正予算「地域デジタル基盤活用推進事業(自動運転レベル4検証タイプ)」に採択。
- この記事のキーワード
バックナンバー
関連記事
新着記事
新刊情報