グラーツ工科大学、EV用急速充電ロボットを企業と共同で開発
2018年8月16日 (木曜) 0:00
オーストリア・グラーツ工科大学は、ドイツやオーストリアの企業と共同で電気自動車(EV)急速充電用ロボットを開発し、試作機を作成したと発表した。
オーストリア・グラーツ工科大学(Graz University of Technology)は2018年8月13日(中央ヨーロッパ時間)、ドイツやオーストリアの企業と共同で電気自動車(EV)急速充電用ロボットを開発し、試作機を作成したと発表した。このロボットは駐車中のEVの充電端子を認識し、ロボットアームに先に付いている充電器のプラグを自動的に挿し込んでEVを充電するというもの。協力企業はドイツBMW、オーストリアMAGNA Steyr、オーストリアKEBAの3社。さらに、オーストリア自動車技術者協会(Austrian Society of Automotive Engineers)も協力している。
図 グラーツ工科大学が企業と共同で開発したEV充電ロボットの試作機

出所 Graz University of Technology
グラーツ工科大学の自動車工学研究科の研究者は、今後はEVの登録台数が急増してくことは間違いないとし、複数のEVになるべく短時間で、しかも自動車の所有者が何も操作することなく充電していく仕組みが必要だと考え、今回のEV充電ロボットを開発したとしている。
今回試作したEV充電ロボットは、自由に動くロボットアームの先に(Combined Charging System:CCS)に準拠した充電機用プラグを取り付けたもの。CCSはヨーロッパで広く普及しているEV充電方式で、大電力を流す高速充電に対応している。ロボットは電力系統につながっており、系統からの電力をEVに充電する方式となっている。
図 EV充電ロボット試作機の全体像
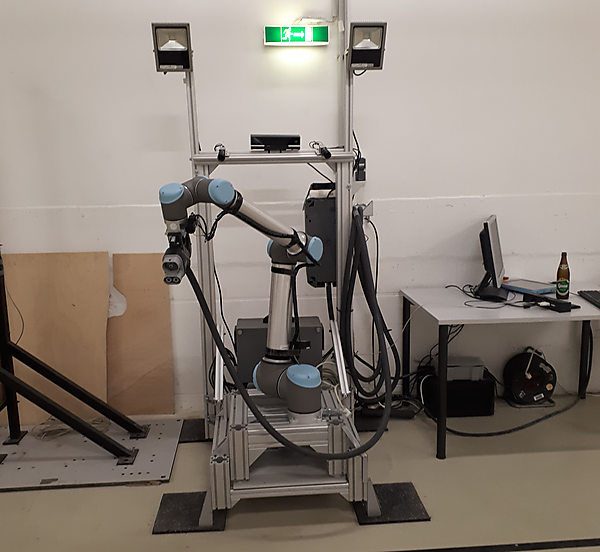
出所 Graz University of Technology
今回作成した充電ロボットの試作機は、搭載しているカメラでEVの駐車位置や充電端子の位置を認識する。端子の位置を認識したら充電用プラグを自動的に挿し込み、充電する。駐車スペースから少々外れた位置に停めた車両の位置も正確に認識し、充電できる。さらに、明るさが異なる駐車場にも対応でき、屋内駐車場でも屋外駐車場でも使用できるという。研究グループは充電ロボットに自走機能を持たせて、大規模な駐車場に停まっている何台ものEVを連続的に充電して回れるようにする計画を立てている。
- この記事のキーワード
筆者の人気記事
新着記事
新刊情報