触覚通信:医療の遠隔手術などに利用
触覚通信:医療の遠隔手術などに利用
〔1〕Haptic(ハプティック)とTactile(タクタイル)
ホログラフィック通信を、エンターテインメント分野などで活用する場合、伝送するデータは視覚情報に限られる可能性がある。しかし、前述したとおり、ホログラフィック通信を応用した遠隔でのトラブルシューティング対応や、遠隔手術などにおいては、触覚情報のやり取りも必要になってくる。そこで使われるのが「触覚通信」(Haptic Communications)である。
この「触覚通信」という用語については、サブグループ2文書をもとにした表1では、Haptic(ハプティック)という用語が使われており、サブグループ1文書をもとにした表2ではTactile(タクタイル)という用語が使われている。
Hapticを英和辞典注6で調べてみると、「触覚の、触覚に基づく」という意味が載っており、Haptic Impressions「触感、手触り」という例が挙げられている。
通信においては、これと似た表現でTactile Communicationsという表現が使われていることもある。このTactileを英和辞典で調べても「触感の、触覚の」という意味やTactile Sensation「触感」という例が載っているなど、どちらも「触覚」について表す単語である。
〔2〕フィードバックを2種類に分類して区別
しかし、Network 2030を解説したサブグループ2文書によると、両者の単語の明確な区別については触れていないものの、触覚に関するフィードバックを2つに分類して区別している。
1つ目の触覚に関するフィードバックは、圧力や質感、振動、温度など、物体の表面に触れたときに感じることができるものを指している。
2つ目の触覚フィードバックは、筋肉や関節、腱に作用する力(重力や引っ張り)などを意味し、位置を認識するために必要となるフィードバックのことを指している。
そのうえで、このうちのどちらか一方、あるいは両方のタイプの触覚フィードバックを含むコミュニケーションを、「触覚通信」(Haptic Communications)と定義している。
サブグループ2文書では、「触覚通信」の利用場面として、産業分野のユースケース
(図2)と遠隔ロボット手術のユースケース(図3)の2つを紹介している。
図2 産業分野のユースケース
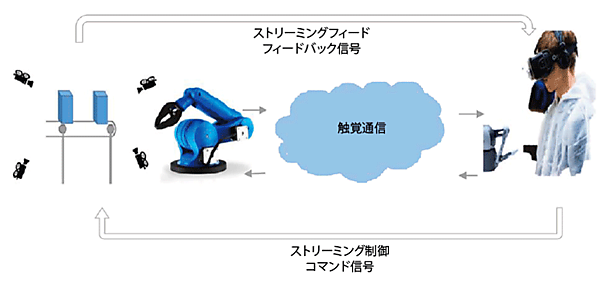
出所 “New Services and Capabilities for Network 2030: Description, Technical Gap and Performance Target Analysis”をもとに著者が日本語化
図3 遠隔ロボット手術のユースケース
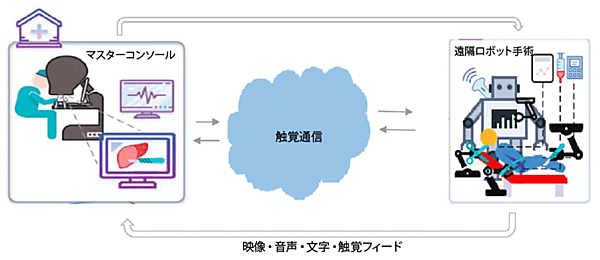
出所:“New Services and Capabilities for Network 2030: Description, Technical Gap and Performance Target Analysis”をもとに著者が日本語化
〔3〕産業分野(機械の制御)と遠隔ロボット手術のユースケース
図2は、遠隔地にいるオペレータが機械を制御する際、触覚フィードバックを利用してサポートをしている様子を表している。これを実現するために必要なのは、遠隔地の機械などを視覚的に監視しながら、触覚情報も同期することである。このためには、VRビデオなどの没入型の映像情報と触覚情報を同期させることが必要になってくる。
図3は、遠隔ロボット手術の様子を表している。外科医がいる場所にはマスターコンソールが設置されており、患者と手術室についての映像や音声をリアルタイムで受け取っている。さらに、患者に関する既存の診断情報などが表示されている場合もある。
また、患者に関する視覚情報は、外科医のヘッドマウントディスプレイなどを通して、ホログラムとして送られることも想定されている。このような環境において、外科医は手元にあるコンソールを使ってリアルタイムで得られる視覚的なフィードバックと、ロボットとやり取りする触覚情報のフィードバックをもとにして手術を進めていくことになる。
これらのユースケースのうち、特に遠隔手術については未来の話のようにも思えるが、2019年3月29日開催の「平成30年度 第3回オンライン診療の適切な実施に関する指針の見直しに関する検討会」注7で公開された「参考資料4 オンライン手術(遠隔手術)について」注8によると、すでに日本では300台以上の手術ロボットが配備されていることが示されており、今後、5Gの整備によって遠隔手術操作の遅延が解消されることへの期待が示されている。
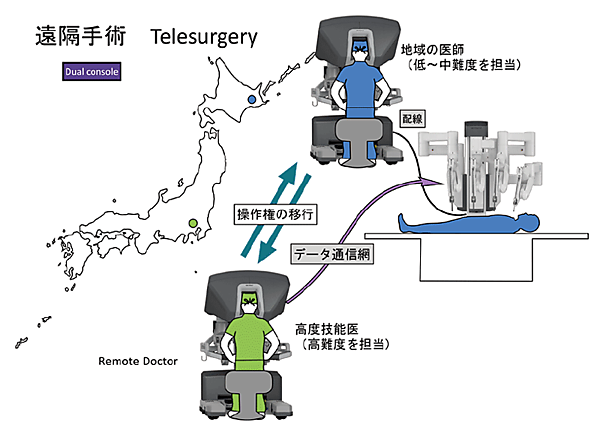
〔4〕近くの外科医と遠隔の外科医の連携
同資料で示されている図4によると、図3のような外科医と患者の1対1の場面だけではなく、患者の近くにいて、
①低〜中難度の処置を担当するためにロボットを操作する外科医と、
②遠隔にて高難度の処置を担当するためにロボットを操作する外科医が、
データ通信網を通して、連携するユースケースも示されている。
▼ 注6
『ランダムハウス英和大辞典』(小学館)
バックナンバー
筆者の人気記事
新着記事
新刊情報